Acta Orthop:机器人辅助VS传统全膝关节置换术,24个月内植入物移位的放射立体测量分析
2025-04-02 医路坦克 MedSci原创

机器人辅助计算机导航的发展旨在改善全膝关节置换术(TKA)中的定位,研究的目的是使用放射立体测量分析(RSA)比较机器人辅助技术与传统技术在骨水泥型双十字韧带稳定型全膝关节置换术中植入物的移位情况。
全膝关节置换术(TKA)是治疗严重骨关节炎(OA)的有效方法,总体生存率极高。然而,据报道,高达20%的患者因残留疼痛、不适以及膝关节功能受限而感到不满意。计算机导航系统有助于实现植入物的精确定位和对线,但尚未显示出能改善临床效果和植入物的使用寿命。机器人计算机导航系统进行截骨/打磨操作,力求比常规计算机导航系统实现更精确的植入物适配。其缺点是成本较高且手术时间延长。传统的手术器械具有成本效益,面临的挑战是组件定位和肢体对线的可重复性精度。
戈特森(Gøthesen)等人在挪威关节置换登记处(NAR)的一项研究中表明,与传统手术(CONV)相比,计算机辅助手术(CAS)的短期翻修风险相同甚至更高,且更多取决于假体的品牌。迪尔霍夫登(Dyrhovden)等人后来进行的一项随访时间更长的研究显示,计算机辅助手术与传统全膝关节置换术的结果相似,但计算机辅助手术因对线不良导致的翻修较少。为了追求更好的功能效果,研发出了一种模拟人体膝关节天然解剖结构和运动学的双十字韧带稳定型假体(Journey II BCS)。这种植入物尚未通过放射立体测量分析(RSA)进行评估。在挪威的日常临床实践中使用假体植入物之前,建议其10年生存率达到骨科数据评估小组(ODEP)的10 A标准,或者至少进行2年的放射立体测量分析评估以显示安全的移位模式,以避免使用易发生早期无菌性松动和翻修的植入物。据我们所知,这是首次对全膝关节置换术中机器人技术与传统技术进行放射立体测量分析比较的研究。这项研究的目的是使用放射立体测量分析(RSA),比较机器人辅助技术与传统技术在骨水泥型双十字韧带稳定型全膝关节置换术中植入物的移位情况。
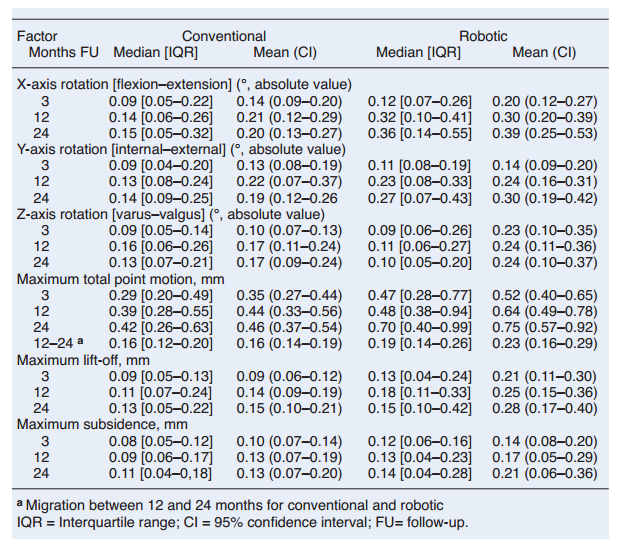
方法:我们从一家医院(2020-2021年)招募了60名患有骨关节炎或关节疾病的全膝关节置换术患者。对患者术后进行长达24个月的检查,以评估胫骨组件的机械稳定性。测量代表移位幅度的最大总点运动(MTPM)、y轴平移的最大负值(下沉)和正值(抬起),以及假体的旋转情况。比较两组的移位情况并评估其精度。
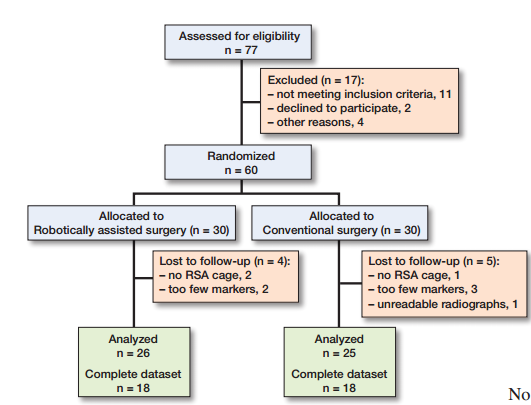
研究中患者的流程图
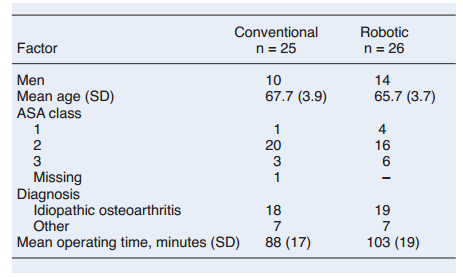
患者特征和手术时间。以计数或平均值(SD)表示的数据
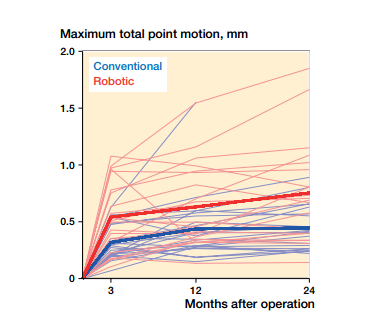
具有个体和平均最大总点运动的图
传统和机器人组的迁移时间长达24个月
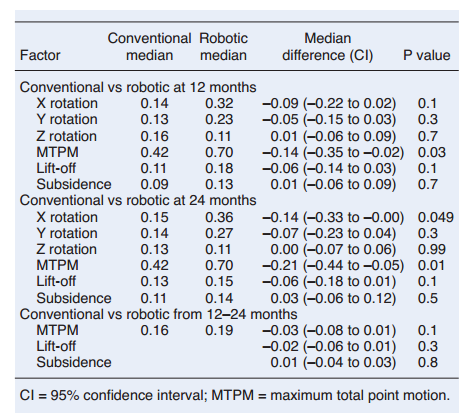
机器人和传统骨水泥胫骨组件在24个月内以及12至24个月之间的迁移中位差异
结果:共有51例带有放射立体测量标记的全膝关节置换术患者可用于比较机器人辅助手术组(n = 26)和传统手术组(n = 25)的胫骨移位情况。传统手术组和机器人辅助手术组在术后第一年的最大总点运动分别为0.44毫米和0.64毫米,在24个月时分别为0.46毫米和0.75毫米。在2年时,机器人辅助手术组的移位比传统手术组多0.21毫米(95%置信区间[CI] 0.05-0.44;P = 0.01)。截至12个月时,所研究的植入物(两组)的总体最大总点运动中位数为0.54毫米(CI 0.44-0.63),在12至24个月之间为0.19毫米(CI 0.16-0.22)。两组的移位幅度和围绕三个轴的旋转幅度都较小,但机器人辅助手术组胫骨组件的屈伸移位略高,为0.14°(CI 0.00-0.33;P = 0.049)。
结论:在长达24个月的时间内,机器人辅助手术组的最大总点运动和胫骨组件的屈伸移位更高。双十字韧带稳定型植入物的总体移位模式是可接受的。
 Acta Orthop:机器人辅助VS传统全膝关节置换术,24个月内植入物移位的放射立体测量分析
Acta Orthop:机器人辅助VS传统全膝关节置换术,24个月内植入物移位的放射立体测量分析
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言











#机器人辅助# #传统骨水泥全膝关节置换术# #植入物移位# #放射立体测量#
14